SAUM
·SAUM est un projet de recherche étudiant visant à monitorer l’impact du changement climatique sur les lacs nordiques canadiens en obtenant certaines données physicochimiques utiles tout au long de l’année. Il est mené par le Laboratoire Nanotechnologies et Nanosystèmes et est associé avec l’Université de Sherbrooke.
Motivation du projet
Les images suivantes présentent certains lacs visés qui sont présentement étudiés manuellement en mesurant des données au cours de l’été. Tout est fait au cours de l’été puisque l’environnement est trop hostile durant les autres périodes de l’année et n’est pas accessible.


SAUM vise a laisser une station sous-marine pour récupérer des données tout au long de l’année. Ceci permet d’obtenir plus de données et de caractériser le comportement des lacs au cours de l’hiver. La solution doit être résiliente, efficace énergétiquement et fiable.
Requis
Les requis principaux sont définis comme suit par l’équipe:
- Mesurer la température, le pH et la conductivité électrique de l’eau;
- Résister à la formation et la destruction de la calottre de glace;
- Être portable;
- Être facile d’utilisation;
- Accumuler des données mesurées pendant 1 an;
- Être réutilisable;
Certains autres requis ont été mis de l’avant et implémentés, mais ceux-ci étaient non-négociables.
Solution
La solution proposée consiste en une base submergée hébergeant un circuit imprimé personnalisé alimentant et contrôlant des capteurs externes. Cette station submergée transmet des données périodiquement vers une autre station sur la berge en tant que backup pour éventuellement synchroniser le tout en ligne via satellites. Tous les composants sont indépendants et sont conçus pour durer une année.
Le diagramme suivant résume la solution.
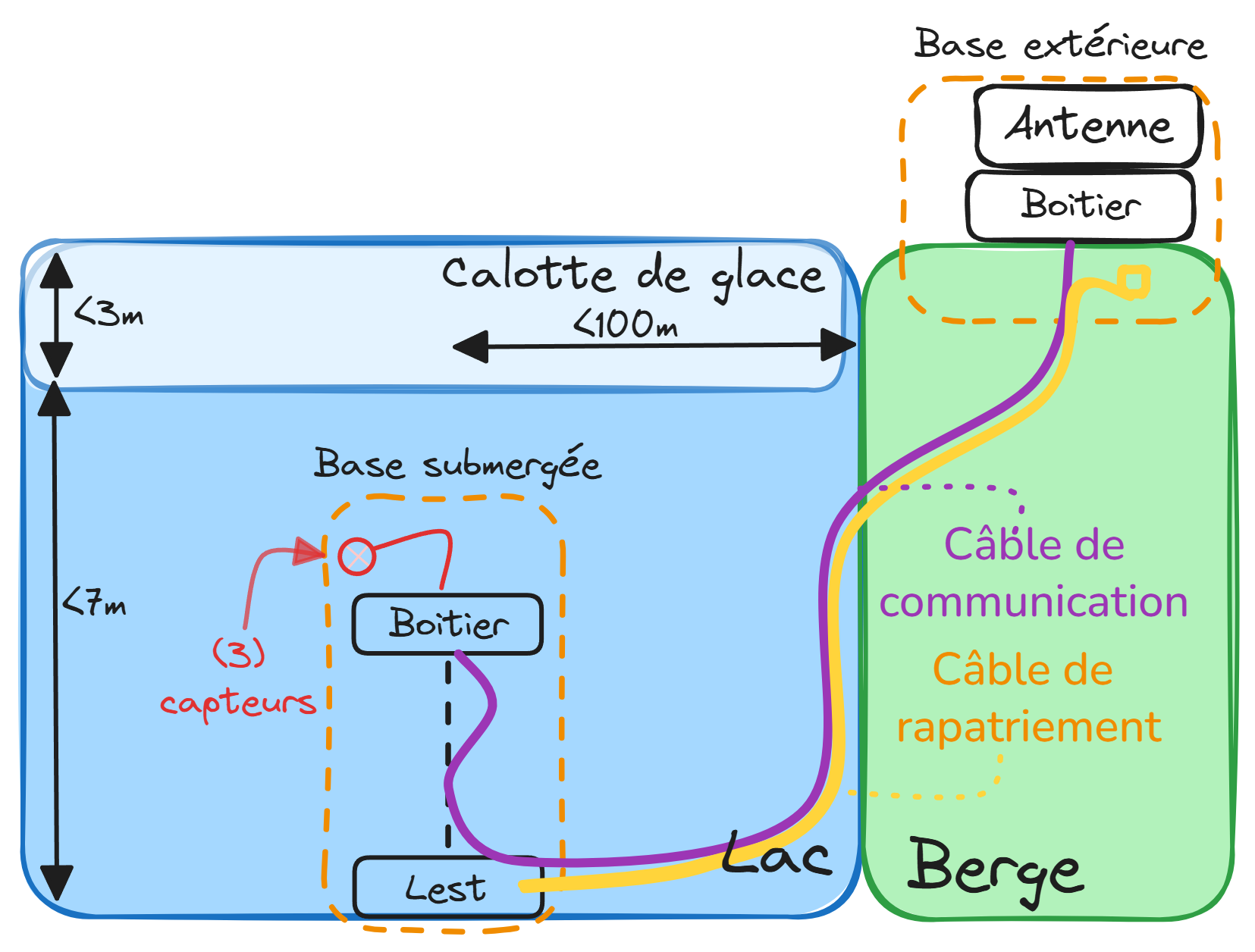 Diagramme simplifié de la solution
Diagramme simplifié de la solution
Les stations sont mieux détaillées par les CADs suivants.
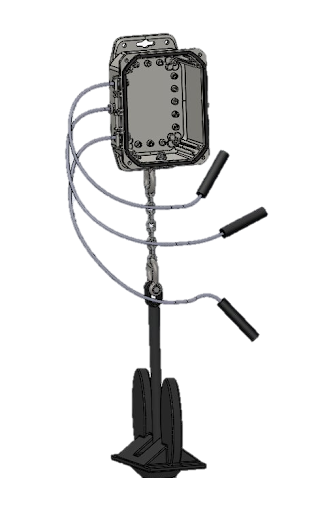
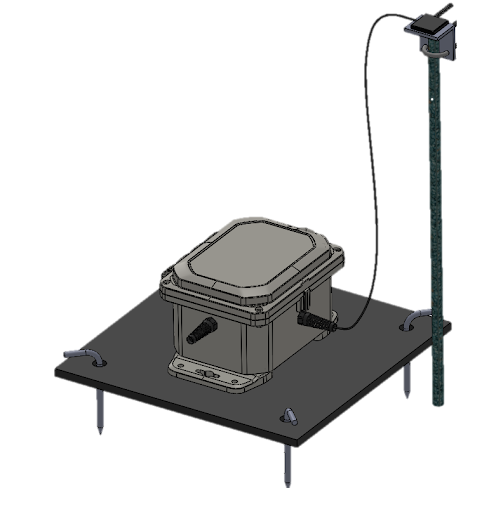
Finalement, les boitiers contiennent trois composants: le circuit imprimé, les batteries et le stockage. Ils communiquent vers divers périphériques par UART. Les deux stations peuvent être configurées avec un ordinateur portable en utilisant un programme externe (appelé Atlanta).
D’un point de vue électronique et logiciel, les différents composants sont architecturés ainsi:
 Schéma électronique et logiciel de haut niveau
Schéma électronique et logiciel de haut niveau
Loch
Loch est le programme exécuté par la station submergée. Son but est de mesurer les données physicochimiques des lacs et de conserver les valeurs pendant une année. La station est conçue pour être le plus fiable et efficace énergétiquement possible.
En résumé, la boucle principale est la suivante.
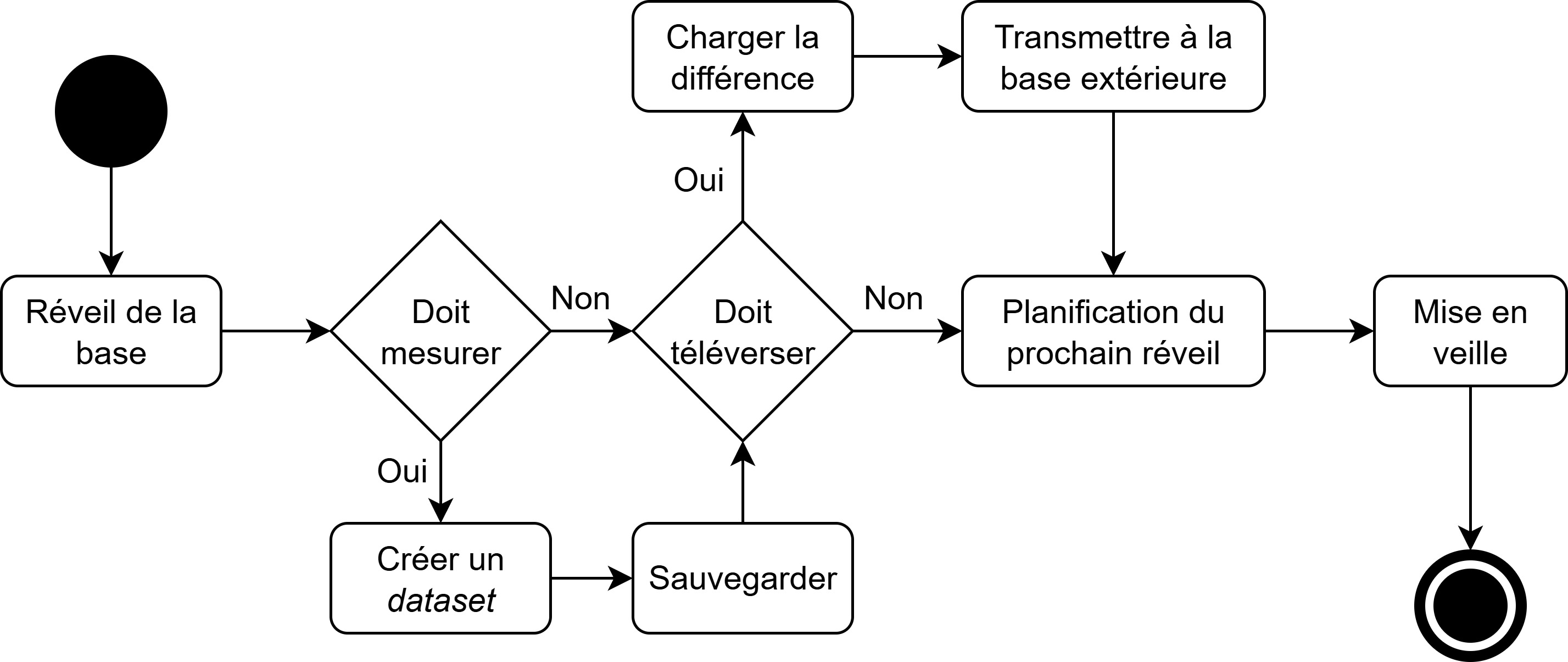 Version simplifiée de la boucle principale de Loch
Version simplifiée de la boucle principale de Loch
Pigeon
Pigeon est un protocole binaire personnalisé transmis par UART afin de communiquer entre les stations et avec Atlanta. Toutes les transmissions utilisent la structure suivante. Le protocole est implémenté en C et en Go.
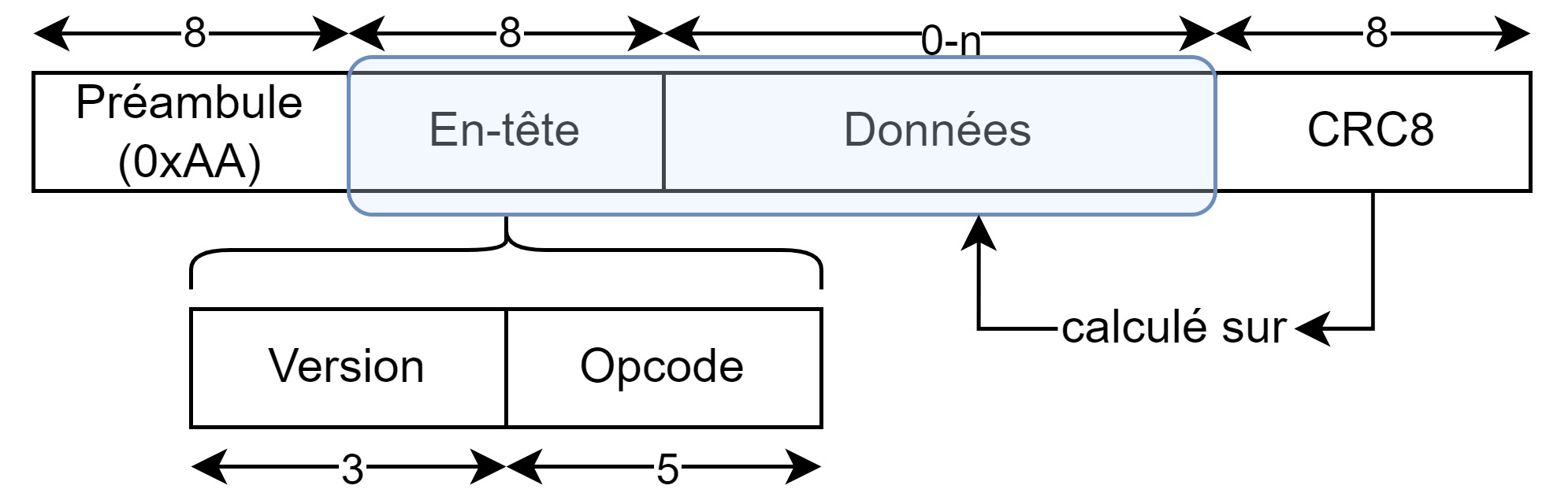 Structure des transmissions de Pigeon
Structure des transmissions de Pigeon
Atlanta
Atlanta est un programme externe fait pour interagir avec les appareils embarqués. Il agit en tant que UI pour faciliter la configuration and le rapatriement des données. Cependant, toutes les fonctions sont aussi disponibles dans le terminal pour automatiser les processus.
Les requis principaux sont:
- Détecter une station connectée (via USB);
- Écrire et lire la configuration d’une station;
- Lire les données sauvegardées;
- Valider l’intégrité d’une station.
Atlanta est mis de l’avant par ses maquettes.
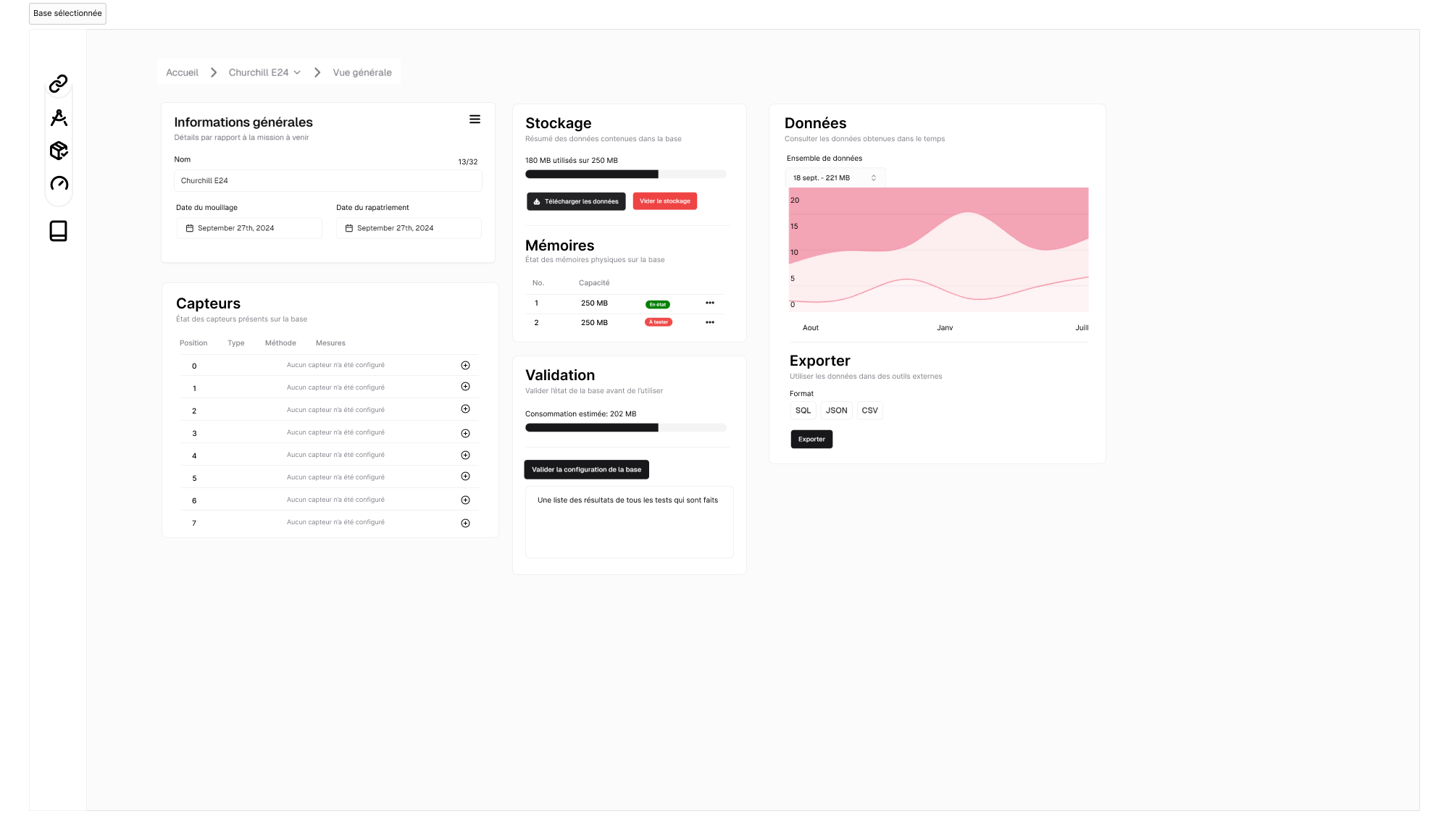 Menu de sélection d’une base
Menu de sélection d’une base
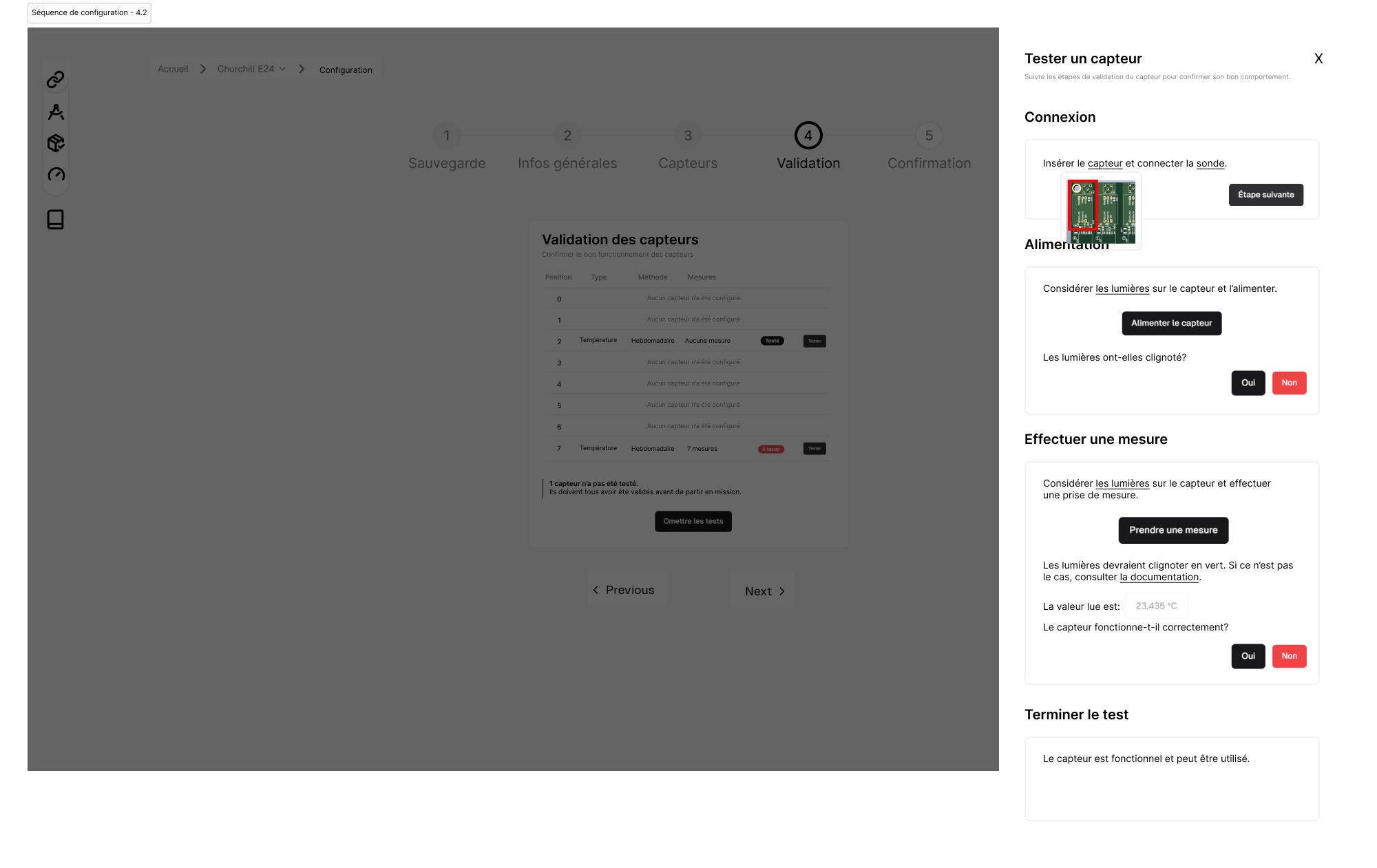
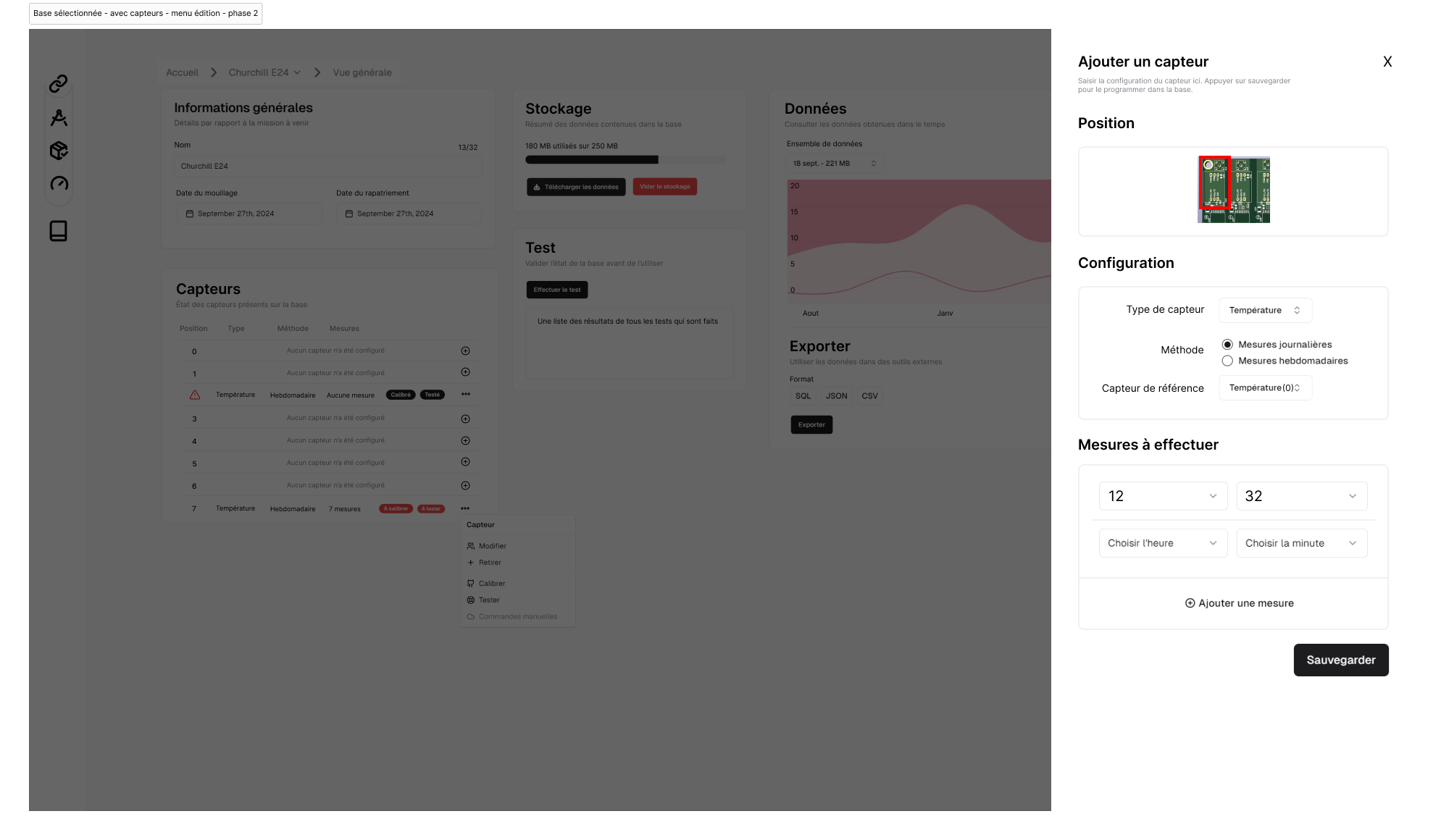 Configuration d’un capteur pour une mission à venir
Configuration d’un capteur pour une mission à venir
Tests
Pour valider le comportement prévu, plusieurs tests ont été effectués au cours de diverses étapes de réalisation. En guise d’exemple, le programme principal a été testé en utilisant un kit de développement (alors que le circuit imprimpé était en fabrication) et des capteurs. Par après, c’était une étape facile de remplacer le kit de développement par le vrai circuit. Ici sont des journaux qui ont permis de valider la fréquence des mesures, les valeurs lues ainsi que le stockage en temps réel.
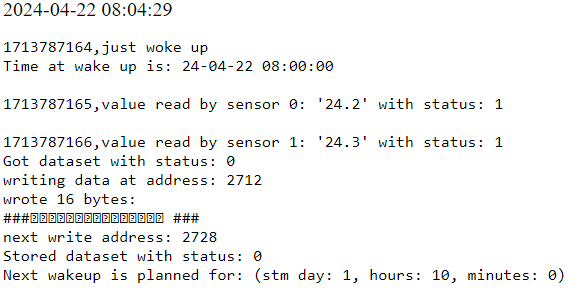 Journaux d’un test s’étalant sur plusieurs jours
Journaux d’un test s’étalant sur plusieurs jours
Certains tests ont aussi été fait pour valider les processus de déploiement et de rapatriement dans un environnement local.
 Test du processus de déploiement
Test du processus de déploiement
Mission Churchill
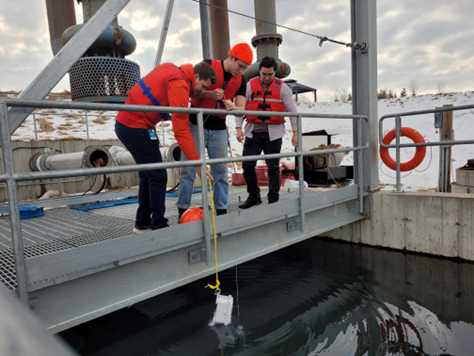
Au cours de l’été 2024, le premier prototype a été déployé 2 semaines à Churchill, MB en tant que premier test.
Site de la mission à Churchill